2025.01.20
底質調査機器シリーズ(その5):柱状採泥器 その2
海と地球の科学技術コンサルタント
2024.12.23
令和5年度(2023年度)社内で取り組んだ「水産資源事業開発タスクフォース」では、令和4年度から開始した「自律型無人ボートの開発」を柱として、取り組みをさらに進めてきました。
本開発は、東京海洋大学田原研究室との共同研究により、令和5年(2023年)6月より東京海洋大学の施設を使用した水槽試験、学内岸壁(以下ポンド)試験を皮切りに、7月の海上試験、8月~12月の再度の水槽試験、ポンド試験、10月ならびに12月の海上試験(横須賀市荒崎海岸)を経て、航行に関する各種パラメーターの調整が完了し、自律型無人ボート(ASV)が完成しました。

東京海洋大学の水槽施設を利用した試験の様子

東京海洋大学のポンドでの試験の様子

横須賀市荒崎海岸での海上試験の様子
完成したASVの主要諸元は以下の表の通りで、GNSS(全球測位衛星システム)と通信装置(4G-LTE)を搭載し、設定したコースに沿って自律航行しながら、水中カメラやサイドスキャンソナーなどの観測機器による沿岸域の海洋調査が可能です。ASVは陸上局からのマニュアル操作やラジコン用プロポによる直接の操作も可能です。1日の調査の目安は、1ヘクタール(ha:100m×100m)の範囲を想定し、100mの測線を2m置きに50本観測するような航行が可能です。
| 全長 | 2262 mm |
|---|---|
| 全幅 | 954 mm |
| 全高 | 1408 mm |
| 重量 | 112.6 kg |
| 稼働時間 | 1.5h程度(海況及び測線による) |
| 通信規格 | 4G-LTE |
| 位置測位 | RTK |
| 監視装置 | 前方カメラ / 水中カメラ / ソナー(水深・地形監視) |
| 制御機能 | 自律航行 / 定点保持 / 測線設定 / 遠隔操作 |
| 安全機能 | 緊急時停止機構 |
| 拡張IF | LAN / DC24V |
| 作動環境 | 温度:0~40℃ |
令和6年度(2024年度)は、オペレーターの習熟訓練も兼ね、観測装置である水中カメラやサイドスキャンソナーを運用し、様々な場所で映像やデータを収集してます。また、得られた映像やデータを基に、AI画像認識システムを用いたウニの判別、海底地形マップの作図、水中カメラの映像から海底のモザイク画像の作成など、データ処理技術の向上に努めています。
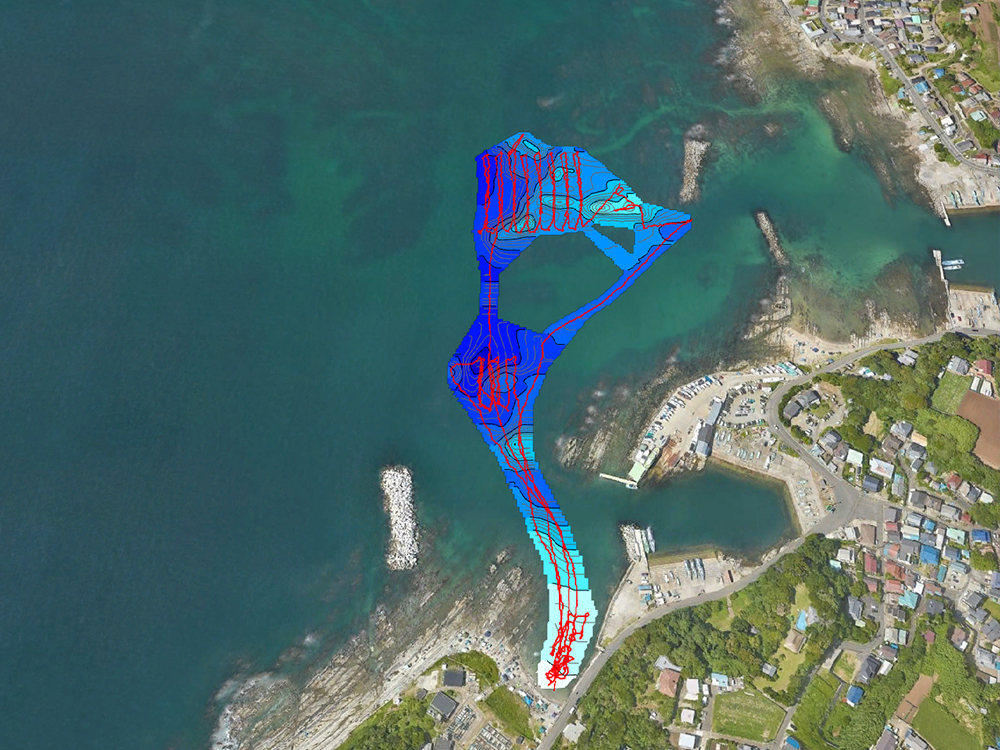
海底地形マップの作図例
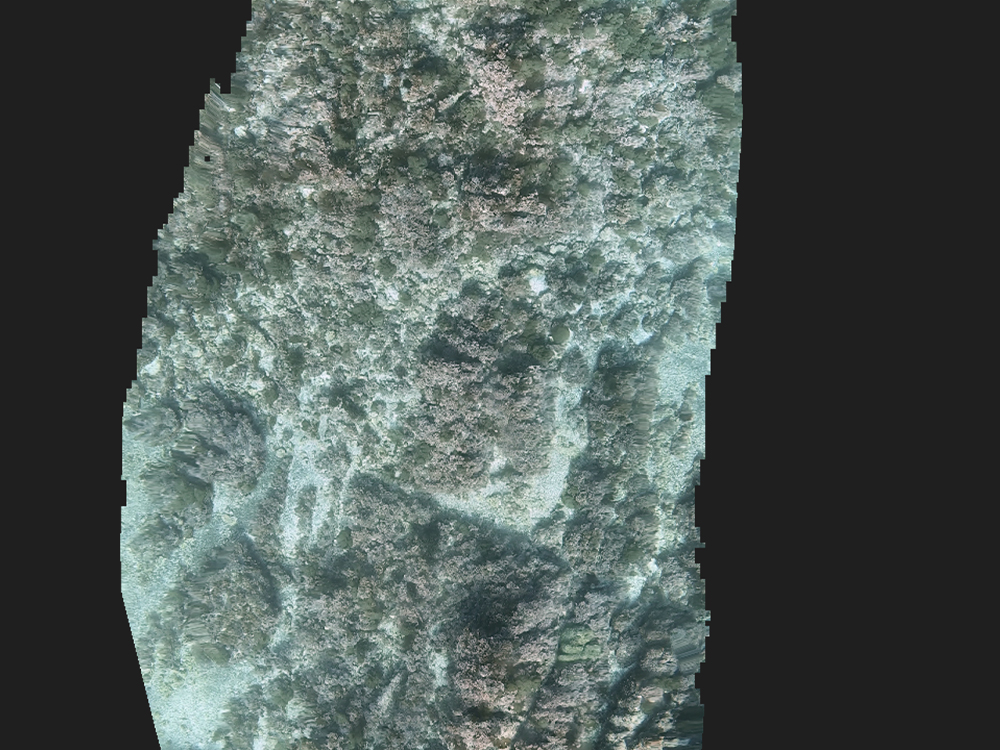
取得した映像から海底のモザイク画像を作成した例
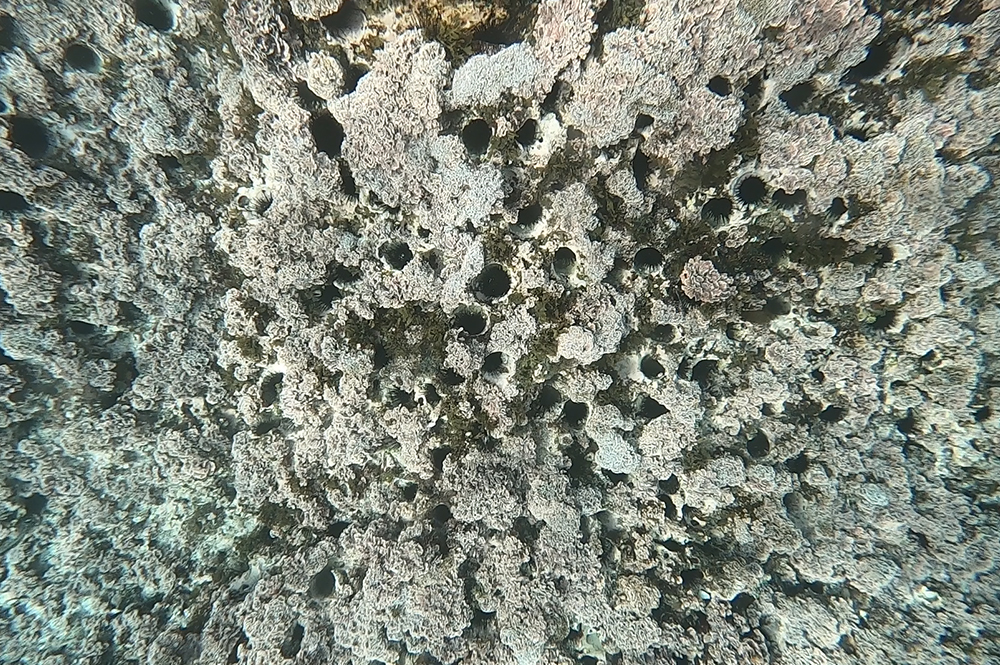
また、機体の改良の取り組みも進めており、航行時の直進性向上について2024年9月に久里浜港で藻場の観察を兼ねて試験しました。一般に船は強い横風を受けると流されやすいため、風の方向と平行に走らせる方が直進性は安定します。今回は試験的に陸上局に設置した風向風速計の数値データをモニターに表示し、風向と平行にコース設定することによりASVの直進性が向上することを確認できました。また、海底映像の撮影では海水の濁りのために鮮明な映像を取得することが難しかったのですが、ところどころでアマモなど海草の分布を確認しました。

久里浜港を自律航行するASV①

久里浜港を自律航行するASV②

岸壁の車両内に設置した陸上局でのASV監視
久里浜港で見られたアマモ場の様子
今後、さらに自律航行や観測機器を安定して運用できるように機体の改良を進め、ウニ・藻場といった海中生物の分布調査や海底地形調査などにASVを活用していきます。